DDPGは2015年に提案された強化学習手法で、連続制御タスク向けに設計され、実世界の複雑な問題解決に威力を発揮。ここではその特徴や応用例について詳しく紹介します。
目次
この記事の目次
- DDPGの定義
- アルゴリズムの背景
- 実装のポイント
- 他の手法との比較
- まとめ
DDPGの定義
DDPGは、複雑な環境で行動を選択するためのアルゴリズムで、強化学習と深層学習を融合したものです。
この手法では、行動空間が連続的な場合でも効果的にポリシーを更新します。たとえば、ロボットアームを操作する問題において、DDPGはパラメータの微調整を行うことでより正確なコントロールを可能にします。
アルゴリズムの背景
DDPGは、DQNなどの離散的行動空間向けの手法に加えて、連続的な環境にも対応できる新たなアプローチを提供します。
具体的には、ロボットの移動やドローンの制御など、物理的なシステムを直接コントロールするアプリケーションで活用されています。
実装のポイント
DDPGを効果的に利用するには、まず問題の性質に応じた最適なハイパーパラメータを選定することが重要です。
さらに、状態空間や報酬関数の設計も重要な要素であり、これらの設定により学習効率が大きく左右されます。
他の手法との比較
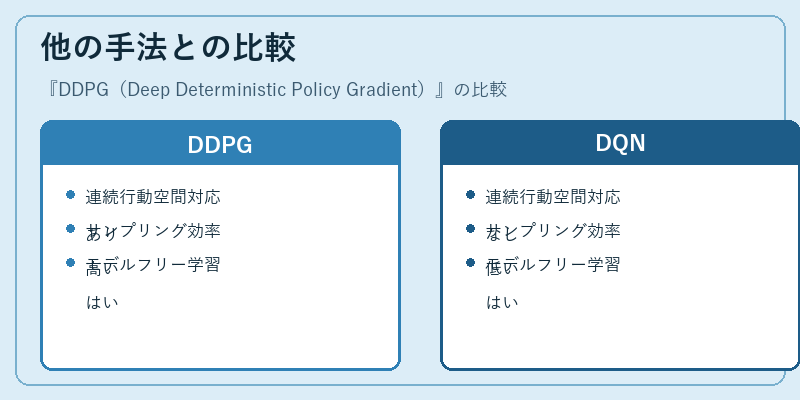
DDPGは、従来のDQNが解決困難とされた問題にも挑戦できる一方で、計算資源や学習時間を求めやすい特長があります。
しかし、状況によってはDQNの方が汎用性が高い場合もあるため、実装する際には適切な選択が必要となります。
まとめ
DDPGは、連続的な行動空間を持つ複雑な問題に対処するための強力なツールであり、機械学習分野における新たな可能性を示しています。
※本記事はIT用語辞典の手書きドラフトです。公開前に最新情報・出典を確認のうえ加筆修正してください。