EtherCATは2003年にビオレッド社によって開発されたリアルタイム制御ネットワークです。高精度、低遅延の特性を活かし、産業機器間の通信において広く利用されています。
この記事の目次
- EtherCATの特徴
- EtherCATの歴史的背景
- EtherCATの動作原理
- EtherCATとその他の通信技術
- まとめ
EtherCATの特徴
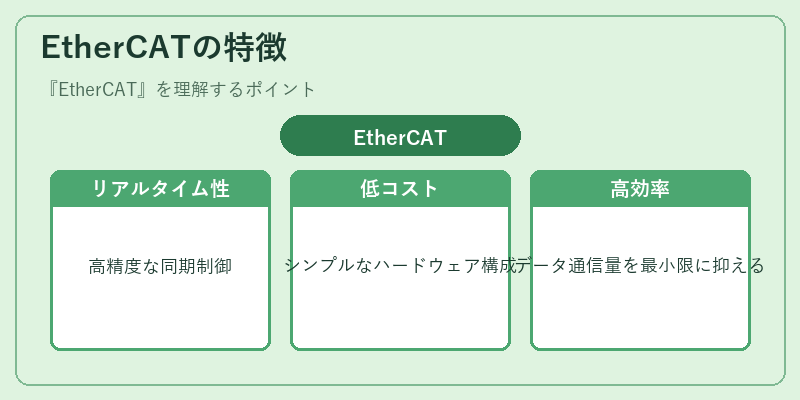
EtherCATは、産業機器間の通信遅延やデータ転送量を大幅に削減します。これにより、機械制御におけるリアルタイム性が向上し、複雑なシステムでも安定した動作が可能になります。
例えば、ロボット工学においては、EtherCATの低遅延と高効率特性が機器の同期制御や高速応答を実現します。
EtherCATの歴史的背景
EtherCATは、当時の産業分野におけるリアルタイム通信の要求に応えるべく開発されました。その確固たる存在感から、迅速な規格化が進められました。
この過程で、EtherCATはIECや他の国際標準団体との連携を深め、その技術的な優位性と柔軟さを証明してきました。
EtherCATの動作原理
EtherCATは、データフレームをスレイブ装置間で順伝搬させる方式を採用しています。各スレイブは、必要に応じてデータフレームの内容を書き換えます。
これにより、ネットワーク全体での同期処理が効率化され、高速な制御信号の伝送やデータ取得が可能となります。
EtherCATとその他の通信技術
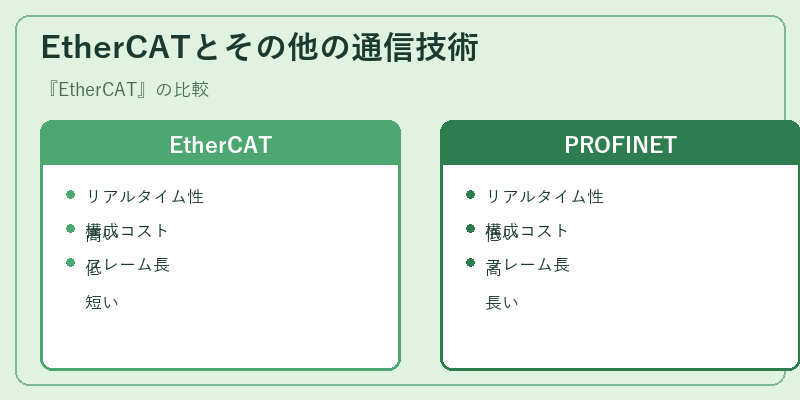
EtherCATと比較して、PROFINETは通信遅延が発生しやすく、またネットワークの設定や拡張にかかる費用も高い傾向があります。
しかし、両者は異なるユースケースに対応しており、例えば制御系のニーズではEtherCATの方が優れている一方で、情報システムとの連携ではPROFINETが適することがあります。
まとめ
産業用ネットワーク技術としてのEtherCATは、リアルタイム性と効率性を兼ね備えた現代的なソリューションとして、更なる進化を見込んでいます。
※本記事はIT用語辞典の手書きドラフトです。公開前に最新情報・出典を確認のうえ加筆修正してください。