Go言語標準ライブラリのsync.Mapは、マルチスレッド環境下での安全かつ効率的なデータ操作を可能にする重要な構造体です。2012年にGo 1.1で導入されたsync.Mapは、一般的な同期メカニズムとは異なる独自の実装を持ち、そのユニークさから注目を集めています。
この記事の目次
- sync.Mapの基本概念
- 内部仕組みとアルゴリズム
- sync.Mapの歴史と進化
- sync.Mapと他の同期メカニズムの比較
- まとめ
sync.Mapの基本概念
sync.Mapは、Go言語で使用されるパッケージsyncの一部です。その名前が示す通り、この構造体は標準ライブラリに含まれているため、プロジェクト内ですぐに利用できます。
実際のアプリケーションでは、複数スレッドやgoroutine間でのデータ共有が必要な状況がしばしば起こります。sync.Mapを利用することで、これらの問題を効率的に解決することが可能となります。
内部仕組みとアルゴリズム
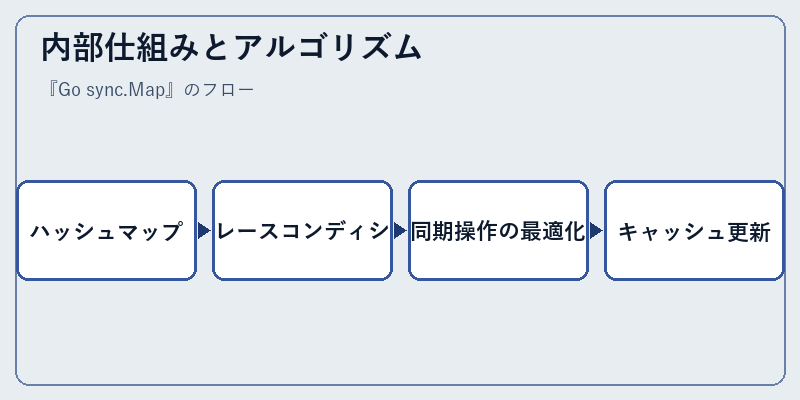
sync.Mapは、内部的には2つのハッシュマップで構成されています。一つ目は通常のデータを格納するためのもので、もう一つはロックのない読み取り専用のコピーです。
この仕組みにより、sync.Mapは高頻度での読み込みや書き込み操作においても、パフォーマンスと効率性を両立させることができます。
sync.Mapの歴史と進化
sync.Mapは、2012年にGo 1.1で初めて導入されました。それ以来、多数のアップデートを通じてパフォーマンスや機能が改善されてきました。
特に2015年以降、Go言語コミュニティによって積極的な開発が行われ、sync.Mapはより強力なツールとして進化を遂げました。
sync.Mapと他の同期メカニズムの比較
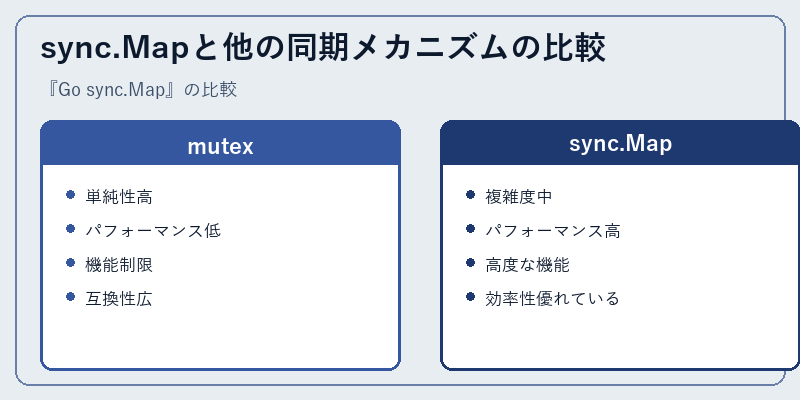
Go言語では、mutexやchannelなどさまざまな同期メカニズムが利用可能ですが、sync.Mapはそれらの特徴を組み合わせた上で独自のアプローチを採用しています。
結果として、sync.Mapは他の同期手段と比較して、パフォーマンス面で優れた結果をもたらすことが期待できます。
まとめ
Go sync.Mapは、マルチスレッド環境でのデータ操作において重要な役割を果たし、開発者の手助けとなる強力なツールです。sync.Mapの詳細な理解と適切な活用を通じて、より効率的で安全なアプリケーションの構築が可能となります。
※本記事はIT用語辞典の手書きドラフトです。公開前に最新情報・出典を確認のうえ加筆修正してください。