Graham Scanは、1972年にフレデリック・グラハムによって提唱されたアルゴリズムであり、平面上の点集合から最小凸多角形を生成する効率的な方法を提供します。この記事では、その背後にある原理と最新の応用について詳細に解説します。
この記事の目次
- Graham Scanとは
- アルゴリズムの背後にある理論
- 比較対象: Jarvis March
- 現実世界での応用
- まとめ
Graham Scanとは
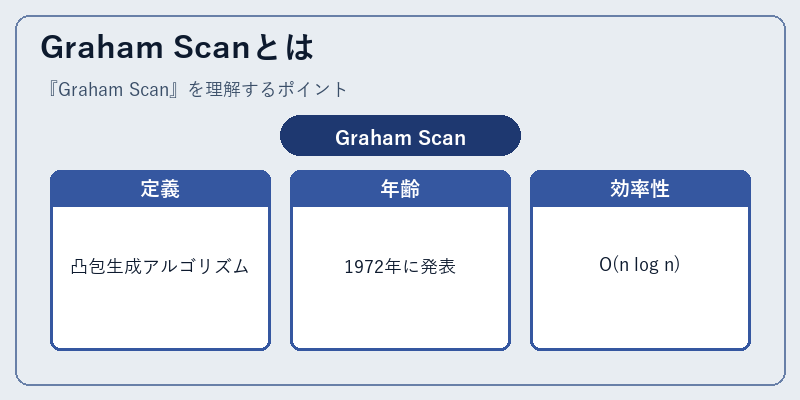
Graham Scanは、与えられた点集合からその凸包を求めるために使用される効率的なアルゴリズムです。具体的には、点集合が円周上にあるときの凸包を構築する方法を定式化しました。
このアルゴリズムは、まず各点の極座標系での角度順にソートし、最小多角形を形成するために点を取り入れながら進行します。その過程で、既存の多角形が凹となる場合、最適な形状になるまでバックトラックを行います。
アルゴリズムの背後にある理論
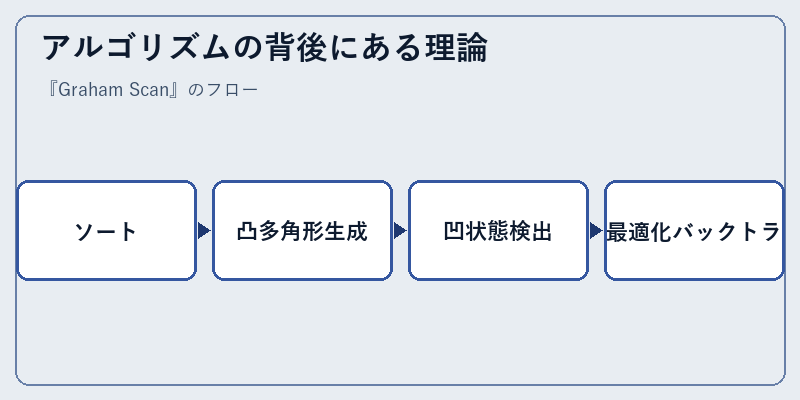
Graham Scanは、まず与えられた点集合を極座標系で角度順に並べ替えます。このステップでは、点の直交座標から極座標へと変換し、x軸との傾斜角に基づいてソートします。
次に、最も左端にある点から始め、極座標順に各点を追加しつつ凸多角形を形成していきます。新たに入れた点が既存の多角形内側に位置する場合、その点は削除されます。この過程を繰り返すことで最適な凸包を得ることができます。
比較対象: Jarvis March
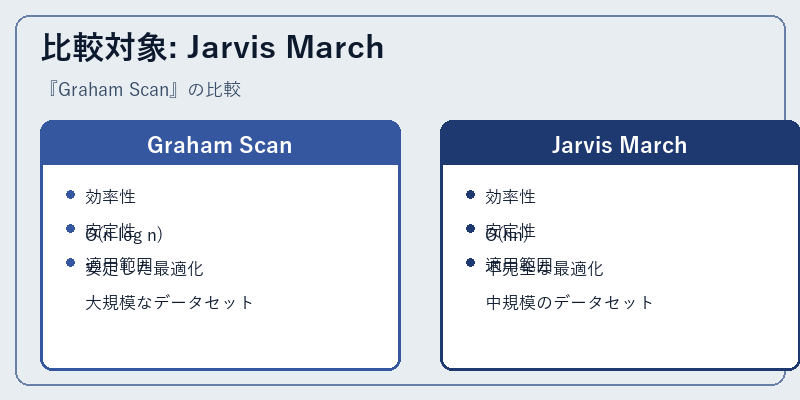
Graham Scanは、凸包生成アルゴリズムの中でも特に高速で安定しています。その一方でJarvis Marchも同様の問題を解決しますが、計算効率と最適性に課題があります。
Graham Scanでは、ソートステップによって全体の性能を向上させる一方、Jarvis Marchは逐次的に新しい点を見つけて凸包を形成するため、特に大きなデータセットでのパフォーマンスが低下します。
現実世界での応用
Graham Scanは、多角形の近似やデータセットの視覚化など、様々な問題解決に利用されています。地理空間情報システム(GIS)においても、地図上のポリゴン領域を効率的に処理する手段として重宝されます。
さらに、ロボット工学では障害物回避に用いられることもあり、計算幾何学の基礎となるアルゴリズムとして重要な位置を占めています。その有用性から多くのソフトウェアライブラリにも組み込まれており、開発者コミュニティで広く受け入れられています。
まとめ
Graham Scanは、計算幾何学における基盤となるアルゴリズムであり、点集合の凸包生成において効率的な解決策を提供します。その理論的背景と応用範囲を通じて、この技術が現代の計算科学にどのように寄与しているか理解することができます。
※本記事はIT用語辞典の手書きドラフトです。公開前に最新情報・出典を確認のうえ加筆修正してください。