
Controller Area Network (CAN)は、1980年代にボッシュ社が開発し、自動車業界を中心に広く普及したリアルタイム通信規格です。今日では産業機器や医療装置などにも応用され、ネットワークの高信頼性と効率化を支えています。
この記事の目次
- CANの基本概念
- CANの歴史的背景
- CANとその他の通信プロトコル
- CANフレーム構造
- まとめ
CANの基本概念
CANは、車両制御や産業機器など多岐にわたる分野で重要な役割を果たす通信規格です。この技術の特徴として、リアルタイム性と高信頼性が挙げられます。
実際には、エンジンやブレーキなどの車両部品間での高速なデータ伝送が必要となりますが、CANはこれを可能にする物理層とデータリンク層を備えています。さらに、エラーハンドリング機能も強力で、ネットワークの信頼性向上に大きく貢献しています。
CANの歴史的背景
1980年代、ボッシュ社がCANを開発しました。これは自動車業界における電子制御装置の増加に伴う通信要求を満たすためのものです。
その後、CANはISO規格として承認され、今では産業機器や医療装置などにも広く採用されています。このように、時代の変化と共に進化し続けています。
CANとその他の通信プロトコル
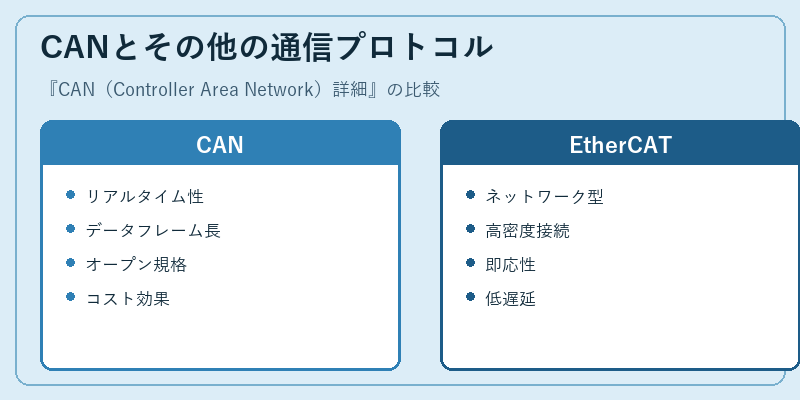
CANはその他の通信プロトコルと比較して、リアルタイム性能が優れています。データフレームの長さも短く、信頼性とコスト効果が高い特徴があります。
一方で、EtherCATはネットワーク全体を一括して制御できる点や高密度接続に適した設計など、CANとは異なる強みを持っています。それぞれの用途によって最適な選択が必要です。
CANフレーム構造
CANの通信プロトコルを理解するには、フレーム構造が重要な要素となります。アリファブレから始まり、データフレームやエラーフレームなどが含まれます。
それぞれのフレームは、通信内容やネットワーク状況に応じて適切な機能を果たします。トランシーバー制御信号も重要な役割を担い、物理層と上位レイヤ間でスムーズな情報伝達を可能にしています。
まとめ
CANは車載ネットワークの基盤となりつつ、産業分野へと広がりを見せています。その高い信頼性と効率的なデータ通信能力により、今後もさまざまなアプリケーションで活用され続けるでしょう。
※本記事はIT用語辞典の手書きドラフトです。公開前に最新情報・出典を確認のうえ加筆修正してください。

コメント